7月2日下午,自動化工程學院邀請英國倫敦大學學院(UCL)計算機學院顏赟達博士在楊浦校區致遠樓304會議室作題為《面向機器人物理交互的預測控制框架:從擾動抑制到擾動生存》的學術報告。講座吸引了學院30余名師生參加,現場學術氛圍濃厚、互動熱烈。
報告伊始,顏博士簡要介紹了UCL的發展概況,重點闡述了其在工程科技領域的研究優勢及國際化、多元化的科研氛圍,并分享了其所在課題組在人才結構、設備配置和研究方向上的特色,展現了國際前沿科研平臺的綜合實力。隨后,顏博士結合自身的求學與科研經歷,介紹了從東南大學本科、博士階段的系統控制研究,到在新加坡國立大學、英國拉夫堡大學等高校的學術任職經歷,為其后續在機器人安全控制領域的研究奠定了堅實基礎。

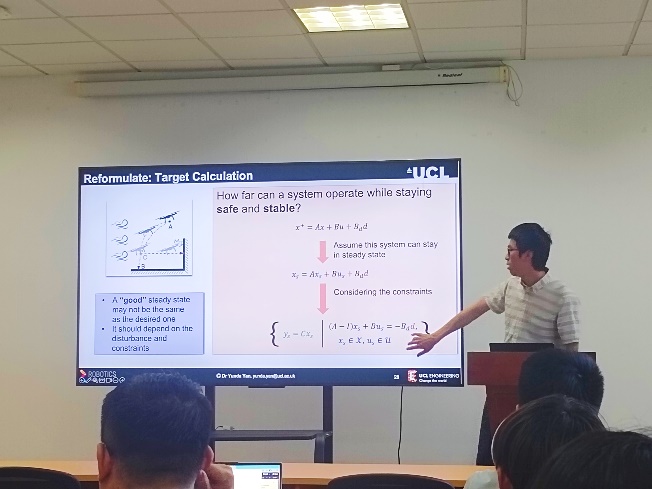
在專題報告環節,顏博士聚焦機器人在復雜物理環境下的安全控制挑戰,以“無人機在強風擾動下懸停失敗”為典型場景,提出“從抗擾動到擾動生存”的研究新范式。他指出,傳統控制方法追求完全抑制擾動,但在現實環境中擾動往往不可預知、不可避免,因此更具適應性的控制策略勢在必行。基于此理念,團隊構建了一個面向物理交互的預測控制框架,融合動態優化與實時決策,使機器人在面對不可控擾動時仍能保障關鍵功能的穩定與安全。該框架已在無人機物理交互實驗中取得了良好驗證效果。
在提問交流環節,現場師生圍繞新控制方法在工業復雜工況中的適用性、模型泛化能力及與機器學習的融合前景展開了深入探討。顏博士就模型適配、數據驅動控制與深度強化學習的結合等問題,分享了前沿觀點與未來設想,引發了師生的廣泛思考與熱烈討論。

自動化工程學院 冒建亮 供稿